
 The name given to the family of beetles known as click-beetles aptly reflects their unique ability to jump: a unique mechanism enables them to jump in the air without using their legs. This mechanism allows them to evade potential predators – or simply to turn over in the case when they get “stuck” on their back.
The name given to the family of beetles known as click-beetles aptly reflects their unique ability to jump: a unique mechanism enables them to jump in the air without using their legs. This mechanism allows them to evade potential predators – or simply to turn over in the case when they get “stuck” on their back.
This mechanism has been studied in the past and its basic mechanics were known: when a beetle lies on its back, a locking mechanism is activated that preserves the beetle’s elastic potential energy and release of this mechanism bounces the beetle into the air, to a height of about 30 cm.
Nevertheless, up until the present research conducted by Dr. Gal Ribak and Distinguished Professor Daniel Weihs of the Technion, scientists did not understand how much control the click-beetle had over the jump.
Dr. Ribak and Prof. Weihs, who also investigated the bio-mechanical constraints on the jump, discovered that even though the click-beetle controlled some elements of the jump, its “launch angle” barely changes. A launch with such an angle – approximately 80 degrees – exerts the majority of the jump energy (98% of the energy) on the vertical axis, that is, to overcoming gravitational pull.
Based on a combination of theory (a mathematical-physical model of the jump) and experiment (tracking the jumps of real click-beetles), the researchers concluded that the click-beetle controls the launch speed but not the launch angle.
“The issue of the energetics of the jump especially drew me,” explains Dr. Ribak. “We are dealing with insects that propel their body upward with enormous acceleration – more than 300 times the gravitational acceleration (the acceleration of a free-falling object) – and it was unclear why so much energy is required to execute such a simple action as turning over. Taking a second look, I noticed that the click-beetle does its somersaults in the air and I wanted to understand how much control the beetle itself has over its aerial acrobatics.”
The subject of controlled movement is an important issue in autonomous systems (autonomous robots); for example, an unmanned vehicle that capsizes while carrying out a task. It is very important that this type of vehicle be able to right itself even in difficult terrain so as to continue its mission. Design of such a complex task requires a sense of the environment and spatial orientation.
“As we are learning from the click-beetle, evolution has supplied us with its own solution to this problem,” says Dr. Ribak. “The jump will successfully turn the beetle over only 50% of the time. In other words, the chances of a successful jump are the same as a failed jump. Therefore, it is possible that the beetle may have to make several jumps in order to, at the end, land on its feet. It is true that an engineer who designs such a mechanism would not get a lot of compliments but as an evolutionary solution, it has proven itself, and the simplicity of the mechanism is an enormous advantage.”
It is likely that following the research of Dr. Ribak and Prof. Weihs, it will be possible to design tiny vehicles that will be able to jump over obstacles.
Another possible application is a mechanism to turn over sensors. “Suppose that we are interested in dispersing a lot of sensors over a certain area,” explains Dr. Ribak. “The most logical way is to toss them from the air. However, it is clear that some sensors will fall on the ground wrong side up. Using a joint based on a similar mechanism to that of the click-beetle, we can get the sensor to jump up into the air and keep jumping until it lands right side up.”
Dr. Gal is a research biologist studying the eco-physiology of swimming and natural flight, with the focus on natural, evolutionary solutions to engineering problems. “Nature provides us with relatively simple solutions for many engineering problems, which to us seem very complex,” he explains.
The present research is part of Dr. Ribak’s post-doctoral work being carried out in the framework of a Technion program for autonomous systems and under the supervision of Distinguished Professor Daniel Weihs of the Faculty of Aeronautical Engineering.
In his doctoral research (at the Technion, under the supervision of Prof. Zeev Arad of the Faculty of Biology and Prof. Danny Weihs), he studied the diving mechanism of birds such as cormorants, using a theoretical model and computer analysis of underwater video. Dr. Ribak showed that diving birds exploit “negative lift”, which works against the force of buoyancy and enables them to stay under water, just as “regular” (positive) lift opposes gravitational pull and allows airplanes to fly.
Above: Monitoring the click-beetle. A photograph demonstrating a single jump, in intervals of 100th/second. Technion spokesman.
 The annual training camp held at the Technion produced outstanding results for Israel:
The annual training camp held at the Technion produced outstanding results for Israel:  “The governments of Israel believe that the country’s universities are “an expense” and do not understand that they are a risk-free investment that produces a return of more than 60%,” said Prof. Shlomo Meital of the Samuel Neaman Institute at the Technion, who participated in a panel of experts at the opening of the meeting of the Technion’s Board of Governors. Technion President, Prof. Peretz Lavie, who opened the discussion, said that the central theme of this year’s meeting is “How do we do this,” and indeed – this is a question that gets asked by many people – how is it that despite its abundance of problems, the state of Israel has become a successful technological superpower?
“The governments of Israel believe that the country’s universities are “an expense” and do not understand that they are a risk-free investment that produces a return of more than 60%,” said Prof. Shlomo Meital of the Samuel Neaman Institute at the Technion, who participated in a panel of experts at the opening of the meeting of the Technion’s Board of Governors. Technion President, Prof. Peretz Lavie, who opened the discussion, said that the central theme of this year’s meeting is “How do we do this,” and indeed – this is a question that gets asked by many people – how is it that despite its abundance of problems, the state of Israel has become a successful technological superpower?
 The agreement is the product of academic cooperation that began as part of the Fulbright Program
The agreement is the product of academic cooperation that began as part of the Fulbright Program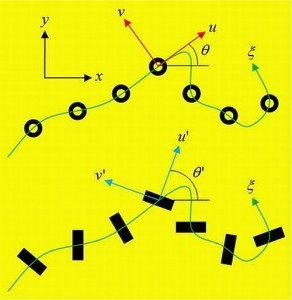 The result of a geometric distortion of a wire composed of coupled nanoantennas
The result of a geometric distortion of a wire composed of coupled nanoantennas The Technion program for autonomous systems held an unmanned autonomous model design and building competition among undergraduate students. The winners of this competition were Erez Horev of the Faculty of Civil and Environmental Engineering, who developed a magnetic car that floats in the air, and Doron Le’or of the Faculty of Mechanical Engineering, who developed a motorized toolbox that follows its owner.
The Technion program for autonomous systems held an unmanned autonomous model design and building competition among undergraduate students. The winners of this competition were Erez Horev of the Faculty of Civil and Environmental Engineering, who developed a magnetic car that floats in the air, and Doron Le’or of the Faculty of Mechanical Engineering, who developed a motorized toolbox that follows its owner.