

עצמאים בשטח
מערכת מיפוי שפותחה בטכניון מגבירה את עצמאותם של עיוורים במרחב עירוני

ד”ר שגיא דליות
חוקרים בטכניון פיתחו מערכת מיפוי חדשנית עבור עיוורים. המחקר נערך על ידי הדוקטורנט אחיטוב כהן, סטודנט לתואר שלישי במיפוי וגאואינפורמציה בפקולטה להנדסה אזרחית וסביבתית, בהנחיית ד”ר שגיא דליות.
על פי ארגון הבריאות העולמי חיים כיום בעולם יותר מ- 40 מיליון עיוורים. אוכלוסייה זו מתמודדת עם אתגרים יומיומיים רבים, שכמה מהם קשורים לתנועה במרחב העירוני: מדרגות, דרכים משותפות להולכי רגל, אופניים ומכוניות, מכשולים פיזיים על המדרכה ועוד. מכשולים אלה מגבילים מאוד את יכולת הניידות של הולכי הרגל העיוורים ואת עצמאותם, וכך פוגעים באיכות חייהם. קיימות כיום טכנולוגיות המשפרות במידת מה את ניידותם של הולכי רגל עיוורים, אולם הן מוגבלות ואינן מאפשרות להם התמצאות בטוחה במרחב.
במחקר שבוצע על ידי אחיטוב כהן במעבדה למיקור המונים סביבתי בטכניון נבדקה האפשרות להשתמש בנתוני מיפוי גיאוגרפי הנתרמים על-ידי אזרחים. תשתית מפות קוד פתוח (OpenStreetMap) מאפשרת גמישות מרבית במונחים של הזנה, עריכה, ניתוח ושימוש בנתוני המיפוי והמידע המרחבי המצטבר, כולל נתונים גאוגרפיים ייעודיים שאינם נמצאים בתשתיות מפות אחרות, כדוגמת Google Maps. המערכת שפיתח אחיטוב מנגישה תשתית זו למטרת ניידות להולכי רגל עיוורים, תוך התייחסת מיוחדת לנתונים מרחביים הרלוונטיים לאוכלוסייה זו.

הדוקטורנט אחיטוב כהן
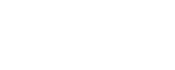
במסגרת המחקר פיתח אחיטוב תוכנה לחישוב מסלולי הליכה המותאמים לצורכיהם של הולכי רגל עיוורים. התוכנה משקללת את הנתונים הסביבתיים והסמנטיים החשובים לאוכלוסייה זו, בדגש על מסלולים בטוחים, נגישים ונוחים לניווט. המחקר כלל למידה מעמיקה, תצפיות וראיונות עם מדריכות התמצאות וניידות, כמו גם עם עיוורים. עבודת שטח זו הובילה להגדרה ברורה של קריטריונים מרחביים, המבטאים בצורה הטובה ביותר היבטים של ניידות, נגישות ובטיחות, בהסתמך על ארבעה פרמטרים עיקריים: המורכבות הגאומטרית של המסלול, סוג וייעוד המסלול, אורך המסלול וציוני דרך ומכשולים לאורך המסלול. במערכת שולבו תכונות נוספות ובהן הנגשה של מעברי חציה ורמזורים. קריטריונים אלה מאפשרים בחינה איכותית וכמותית של מקטעי הדרך השונים בין המוצא ליעד וקביעת רמת הנגישות והביטחון להולך רגל עיוור.
הפיתוח נוסה בכמה מקומות עם מתנדבים עיוורים ועם מדריכה שיקומית, והמתנדבים העידו כי במרבית המקרים המסלול שנבחר על ידי המערכת היה נגיש ובטוח יותר להליכה מהמסלול שחושב על ידי תוכנות מסחריות קיימות כגון Google Maps. בנוסף, המסלולים שנבחרו על ידי התוכנה החדשה היו זהים למסלולים שהגדירה המדריכה המנוסה. הממצאים מעידים כי מדובר בכלי יעיל ושימושי העשוי לרתום את OpenStreetMap לטובת אוכלוסיית העיוורים, וכך לשפר את חייהם בהיבטים של ניידות, נגישות ועצמאות.

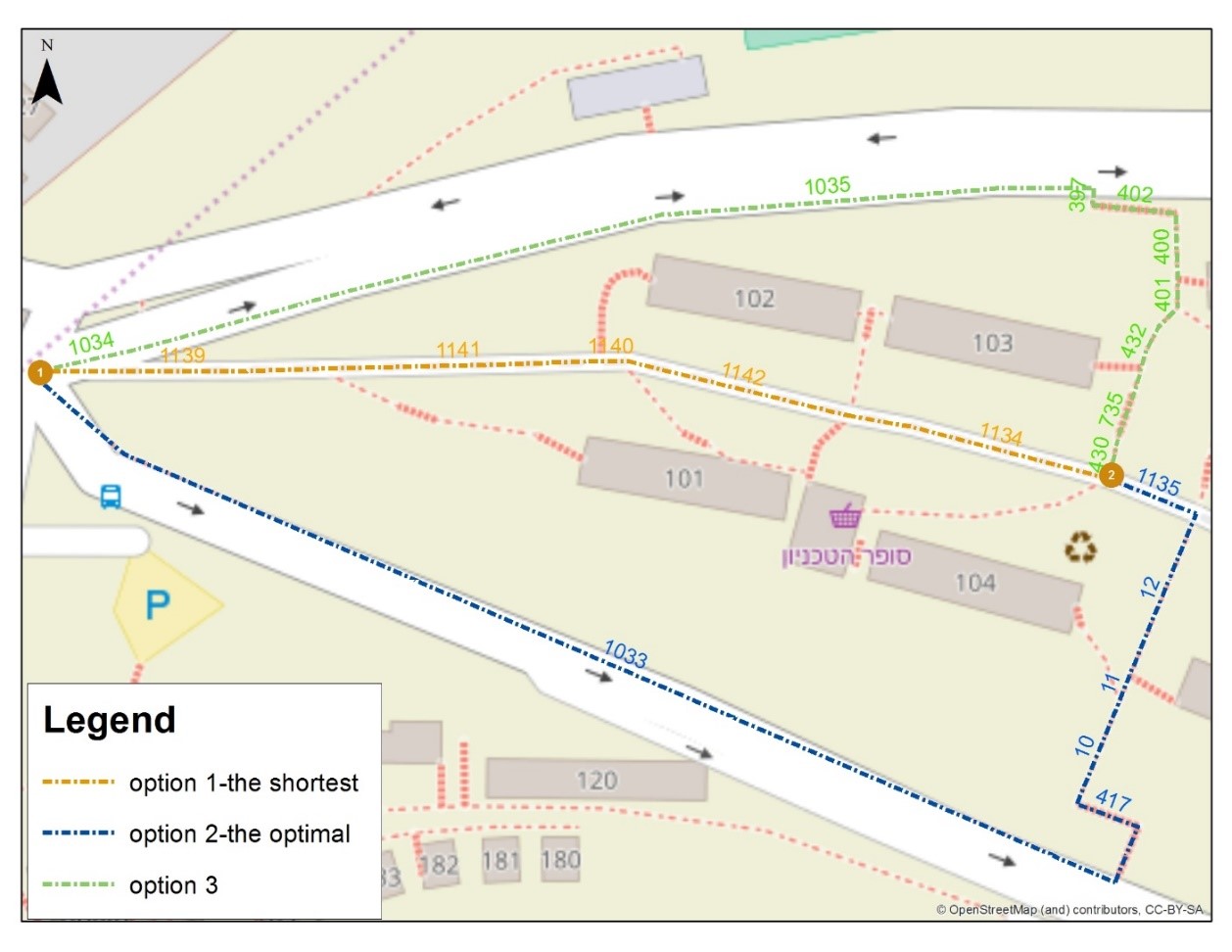
תמונות photo-routes – בתכלת המסלול האופטימלי, בצהוב המסלול הקצר
למאמר בכתב העת Environment and Planning B: Urban Analytics and City Science לחצו כאן
לסרטון המסביר את המחקר: