

בילי וצ’רלי הולכים בגדול

יונתן ספיץ והרובוטים ובילי
יונתן ספיץ וצ’רלי
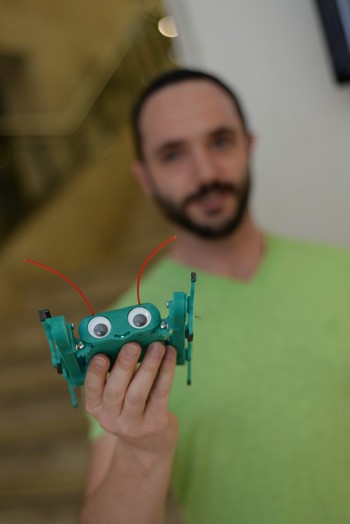
שני הרובוטים שבנה הדוקטורנט יונתן ספיץ, מהפקולטה להנדסת מכונות בטכניון צולחים מכשולים ומדרונות. הסוד: שיטת פיתוח גנטית-אבולוציונית.
בראשית היה בילי – רובוט כחול בגובה 10 סנטימטר ובאורך 15 סנטימטר. בתום ה’הריון’ – חודש של תכנון, הדפסה, תכנות, חיבור האלקטרוניקה ותיקון ליקויים – הוא החל ללכת וגם לצלוח מכשולים. בהמשך הצטרף אליו עמיתו, צ’רלי הירוק. שניהם מסתובבים בקמפוס בהנחייתו של יונתן ספיץ, ה’אבא’ שלהם, שמכוון אותם באמצעות הסמארטפון שלו. הם מסוגלים לצלוח קשיים ומכשולים כגון אבנים, חול ושיפועים גדולים.
ספיץ, דוקטורנט בפקולטה להנדסת מכונות, נולד בארגנטינה, ובתום התיכון הגיע לארץ במסגרת תוכנית ‘עתיד’. “ההחלטה הזאת היתה שילוב של ציונות שספגתי בבית ובתנועת הנוער, ורצון ללמוד בטכניון. הטכניון הוא מוסד מאוד מפורסם בקרב הקהילה היהודית בארגנטינה, והרבה נערים רוצים להגיע לישראל וללמוד בטכניון.”
13 שנים עברו מאז נחת בישראל, והוא זוכר היטב את היום ההוא. “יצאתי מארגנטינה ב-23 בדצמבר 2002, לטיסה של עשרים שעות, שהנחיתה אותי בנתב”ג בשלוש לפנות בוקר. משם הגעתי למרכז הקליטה בכפר סבא.” בחודש יוני 2003 הוא סיים אולפן עברית, ובאוקטובר החל את הלימודים במכינת הטכניון. לאחר תואר ראשון בהנדסת מכונות הוא המשיך ללימודי מגיסטר, וב-2012 עבר למסלול הישיר לדוקטורט, שאותו יסיים בקרוב. “הטכניון מאוד קרוב ללבי,” הוא אומר. “יש סטודנטים שסופרים את הימים לסיום התואר, אבל אני דווקא נהנה. לא סתם עשיתי פה שלושה תארים ברצף.”
את מחקר הדוקטורט הוא עורך במעבדת SMILE בפקולטה להנדסת מכונות, בהנחיית פרופסור מרים זקסנהויז. “כיום עומדים לרשותנו אמצעים שלא היו זמינים עד לפני שנים לא רבות: כוח מיחשוב עצום ומדפסות תלת-ממד,” הוא מסביר. “נכון שהתכנון נשאר משימה מסובכת, אבל ההדפסה התלת-ממדית מאפשרת לך לייצר ‘בבית’ מבנים מאוד מורכבים בעלות נמוכה מאוד. כל אחד מהרובוטים שיצרתי עלה לי כ-200 דולר, זה הכל.”
את בילי וצ’רלי פיתח יונתן בזמנו הפנוי (“זה לא חלק מהדוקטורט”) כהוכחת היתכנות לבנייתם של רובוטים ניידים משוכללים יותר. הוא קידם את השימוש במדפסות תלת-מימד במעבדתו כדי ליצור רובוטים הולכים, שימחישו את שיטות הבקרה שהוא תכנן. סגנון התנועה של הרובוטים פותח בהשראת הטבע, כלומר – הליכה טבעית. “בני אדם הולכים מגיל שנה או שנתיים, ולכן נראה להם שהליכה היא דבר פשוט מאוד – לפחות במישור. רק בתנאי שטח קשים הם נדרשים להתרכז בצעדיהם. גם הבקרים שפיתחתי עובדים ללא צורך במשוב במישורים חלקים, וכאשר הם נעים בשיפועים הם משתמשים במשוב מינימלי.” כדי להצעיד את הרובוטים שלו הוא בנה ‘אלגוריתם גנטי’ – אלגוריתם המתפתח בסימולציה של ‘מוטציות’ והישרדות המתאימים ביותר.
“ההצלחה שלי היא בבניית רובוטים בעלי עבירות גבוהה, שאינם יקרים ולכן אפשר לייצרם גם כ’נחילים’ של רובוטים לשימושים שונים בתחום הביטחון ובליווי וטיפול באנשים חולים. ואת שיטת הבקרה שפיתחתי (ונרשמה כפטנט) אפשר ליישם גם לבקרת הליכה של רובוטים דמויי-אדם וגם ברובוטים רפואיים (כמו ReWalk) וברובוטים לשיקום הליכה. ובאמת, כדי לתרגם את הרעיון ולהפוך אותו למיזם נרשמתי לתחרות BizTEC וגם לתוכנית Runway של Cornell-Tech.”